

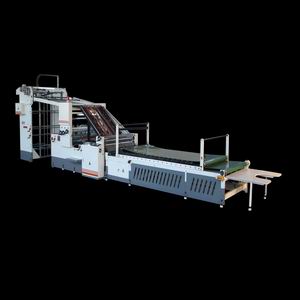
1. 新款高速全自動(dòng)裱紙
印刷行業(yè)目前遇到的招工難及工人工資上漲和勞動(dòng)法等原因, 導(dǎo)致了企業(yè)成本大幅上升, 市場(chǎng)競(jìng)爭(zhēng)力受限制. 我們針對(duì)此情形, 經(jīng)分析后了解到, 只有在正常工作時(shí)間內(nèi) ( 指每日8小時(shí) )將全自動(dòng)裱紙的產(chǎn)能大幅提升, 并將耗材( 膠水 )用量大幅下降, 使得成本下降, 企業(yè)方可實(shí)現(xiàn)盈利.
再者, 2010年春節(jié)后, 市場(chǎng)的經(jīng)濟(jì)也已開(kāi)始漸漸回暖, 業(yè)務(wù)量開(kāi)始有非常明顯的增加趨勢(shì), 但前面提到的問(wèn)題, 著實(shí)讓企業(yè)主又愁又急.
所以, 根據(jù)以上分析, 我們?cè)?/span>2009年進(jìn)行將自動(dòng)裱紙機(jī)及自動(dòng)裱卡機(jī)的兩款機(jī)型的功能特性進(jìn)行了溶合并將高速全自動(dòng)裱紙設(shè)備的生產(chǎn)速度大幅提升, 經(jīng)投產(chǎn)并獲得成功, 制造出一機(jī)雙用的新款高速全自動(dòng)裱紙機(jī).
2. 高速全自動(dòng)裱紙, 高速全自動(dòng)裱卡機(jī)系列產(chǎn)品參數(shù)
|
機(jī) 器 型 號(hào) |
ZHB – 1307 |
ZHB – 1310 |
|
最大紙張 |
寬1300 mm x 長(zhǎng)700mm |
寬1300 mm x 長(zhǎng)1000mm |
|
最小紙張 |
寬 500mm x 長(zhǎng) 300mm |
寬 500mm x 長(zhǎng) 300mm |
|
底紙厚度 |
250 克 – 8mm 厚 |
250 克 – 8mm 厚 |
|
面紙厚 |
120 克 – 700克 |
120 克 – 700克 |
|
貼合精度 |
± 0.5 mm ( 標(biāo)準(zhǔn)平板紙 ) |
± 0.5 mm ( 標(biāo)準(zhǔn)平板紙 ) |
|
最高轉(zhuǎn)速 |
9900 張 / 小時(shí) |
7800 張 / 小時(shí) |
|
適用膠水 |
樹(shù)紙膠, 淀粉卡紙膠等 ( 酸堿值 PH 6-8間適合貼合用膠水 ) |
|
|
機(jī)器重量 |
6500 kg |
6500 kg |
|
動(dòng)力電源 |
380VAC / 3P |
380VAC / 3P |
|
功率 |
16kw |
16kw |
|
適用紙張 |
薄紙,卡紙, 銅版紙¸ 灰紙板, 厚紙板等 |
|
|
適用產(chǎn)品 |
薄紙與厚紙, 灰板紙貼合, 雙面印刷紙貼合, 卡紙貼合等等 |
|
|
適用瓦楞紙 |
高強(qiáng)度正規(guī)單面 A, B, E, F 浪 |
|
|
建議生產(chǎn)速度 250g – 450g (標(biāo)準(zhǔn)平板紙 ) |
100張 - 130張 / 小時(shí) |
90張 - 110張 / 小時(shí) |
3. 高速全自動(dòng)裱紙產(chǎn)品說(shuō)明
1. 本系列產(chǎn)品的機(jī)臺(tái)板壁制造, 全采用大型加工中心一次加工完成, 保證了各個(gè)孔位的精度, 保證設(shè)備運(yùn)轉(zhuǎn)更穩(wěn)定.
2. 面紙的走紙機(jī)構(gòu) : 配置高速自動(dòng)模切機(jī)用飛達(dá)頭, 不論厚紙或薄紙, 保證了走紙高速, 平穩(wěn).
3. 面紙升降臺(tái) : 為配合高速飛達(dá), 采用高強(qiáng)度渦輪減速機(jī), 保證了瞬間提速穩(wěn)定.
4. 面紙載紙臺(tái) : 采用 E 型雙缺口獨(dú)特設(shè)計(jì), 可將待生產(chǎn)紙張用手叉車直接推入, 縮短堆碼紙時(shí)間, 提高效率.
5. 底紙系統(tǒng) : 采用伺服電機(jī)控制系統(tǒng), 靈敏度高, 速度快, 保證了底紙的出紙順暢,不卡紙等特點(diǎn).
6. 底紙吸附系統(tǒng) : 采用變頻控制并配合電磁閥敏捷切換, 保證底紙完全吸附, 且操作簡(jiǎn)單.
7. 膠水輪 : 加厚電鍍鋼輪, 表面精細(xì)研磨, 膠水量可調(diào)至 8g / ㎡ 保證厚薄紙膠水均勻.
8. 膠水補(bǔ)充 : 采用液位自動(dòng)控制, 保證膠水自動(dòng)補(bǔ)充, 確保生產(chǎn)進(jìn)行.
9. 紙張分離 : 針對(duì)高速運(yùn)行, 采用分離爪, 使得紙張從膠水輪過(guò)膠后有效脫離.
10. 貼合定位 : 采用前定位方式,